/assets/images/260916/original/3f3349c3-cad0-4ed8-8372-b191c2e08205?1519625354)
【プロダクト開発秘話】インダストリー事業部での製品開発について〜お客様のためにより速く、より高品質に〜 | 技術ブログ
こんにちは、インダストリー事業部事業部長兼CPO(チーフプロダクトオフィサー)の大西 理王(おおにし りおう)です。事業部長ではありますが、過去にはこちらのようにFusion360を使って電気回...
https://www.wantedly.com/companies/hacarus/post_articles/491718

こんにちは、インダストリー事業部に所属しているエンジニアの白石です。本記事では、インダストリー事業部で開発しているHACARUS Check が制御しているデバイスについて紹介します。
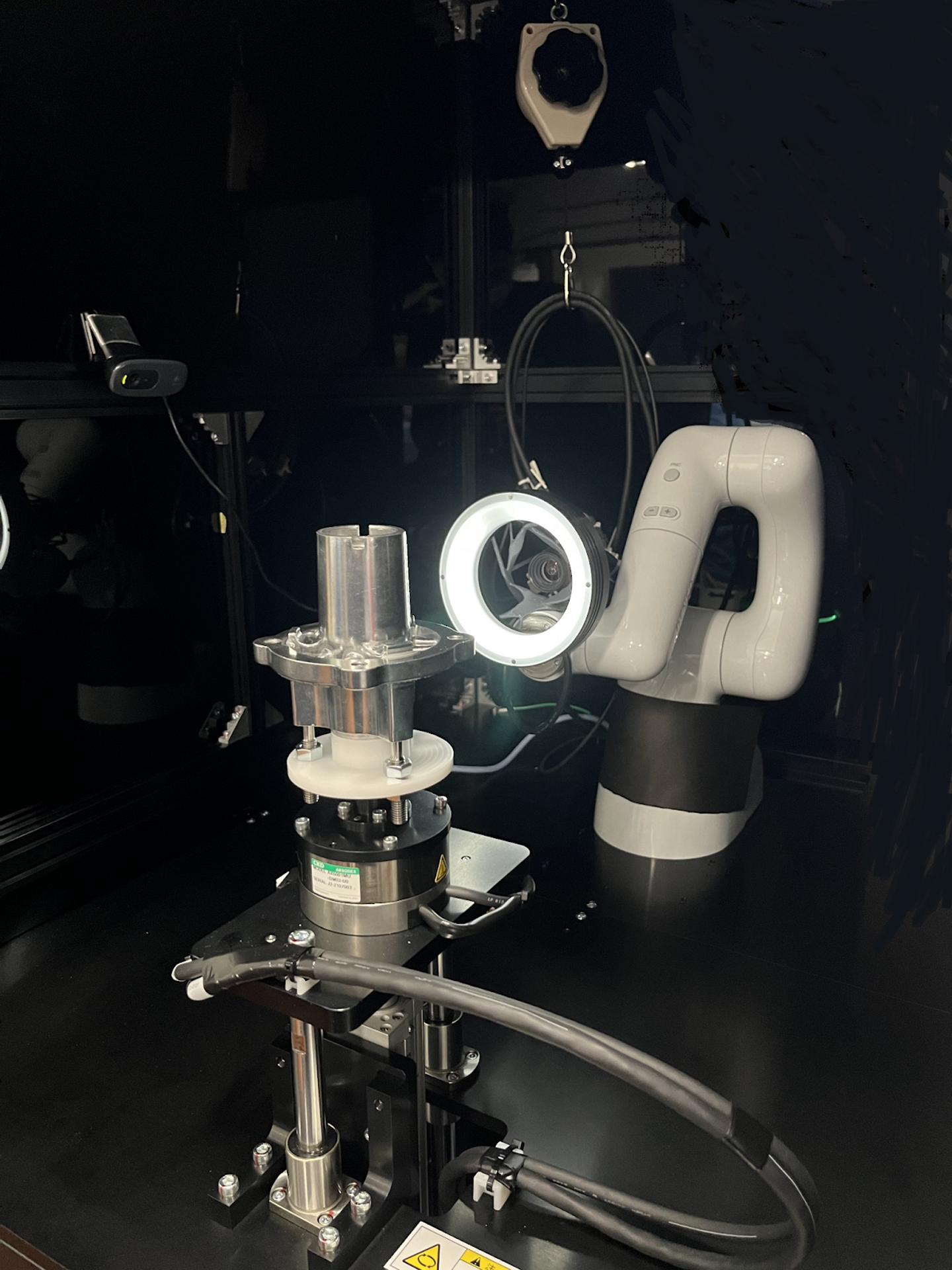
HACARUS Checkは、以下のデバイスを制御し、検査対象ワークを多角度で撮影した上で、得られた画像を検査しています。
これらのデバイスは、以下の画像やHACARUS Checkの紹介ページ、DENSO Wave様のホームページで紹介されている動画 の外観からも確認できます。実際に使われている様子はこちらのビデオから確認できます。
また、これら以外にも検査対象や、お客様の要望に応じてデバイスを追加しています。例えば、以下のデバイスを追加しています。
各デバイスは、基本的にEthernetケーブルで接続され、ネットワーク経由で制御PCから制御されています。ただし、回転昇降台や外観検査開始ボタン等、一部のデバイスはPLCを介して制御しています。このため、ネットワーク制御可能なデバイス以外にも、PLCで制御可能なデバイスも追加/制御が可能です。
また、PLC経由で、お客様のシステムから入力信号を受けて制御を変更することも可能です。
デバイスの制御プログラムは、宇佐見さんの記事でも触れている通り、C#で実装しています。
デバイス制御に関わる主な機能として、以下があります。
複数のデバイスを使った撮影にて、特に困難な点としては実動作と検査時間を踏まえた上での撮影シナリオの作成があります。
前節でデバイスを組み合わせによる苦労について述べましたが、一方でデバイスを組み合わせることで、人の目では検知が難しい不具合の検出を実現できることが、面白く挑戦しがいのある点とも思います。検査対象ワークには、人の手で傾けたりしないと見えない箇所や、人の目では見えづらい不具合を持っているものもあります。
このような、今まで人の手でなければ検査できなかった、人の目では検知が困難な課題を、様々なデバイスを使って解決していく点は、HACARUS Check開発の面白い点の一つとなります。
本記事では、HACARUS Checkが制御しているデバイスについて紹介し、デバイス制御をする上で苦労する点と面白い点について述べさせてもらいました。
HACARUS Checkは、様々な検査対象ワークに対応するため、今後も必要に応じて新規デバイスを導入していきます。
色んなデバイスを使ったシステムの実現にご興味のある方、是非弊社にご応募下さい。
AI外観検査システム 「HACARUS Check」を開発するインダストリー事業部のブログ
/assets/images/260916/original/3f3349c3-cad0-4ed8-8372-b191c2e08205?1519625354)


/assets/images/260916/original/3f3349c3-cad0-4ed8-8372-b191c2e08205?1519625354)

![]()

