東京
中途
新卒
東京ロボティクス株式会社のメンバー
早稲田大学総合機械工学専攻。同大学招聘研究員兼非常勤講師。博士(工学)。専門はロボット工学と測位技術。これまで、フリーランスエンジニアとして、組み込み系開発から高周波回路設計、ロボット開発、Web・DBシステム開発、Windowsアプリ開発、サーバ運用、データ分析など、様々な業務を経験。不惑の四十を前に東京ロボティクス設立を決意。歴史好き。
なにをやっているのか

物流ソリューション

研究用人型ロボット「Torobo」(早稲田AIREC仕様)
東京ロボティクスは、先進的なロボットの開発を行うために2015年に創業したロボティクススタートアップです。主力製品として、これまで研究プラットフォームとしてのロボットアームと人型ロボットをゼロから設計し、製造・販売してきました。
会社設立から約9年が経ち、先端的なロボットソリューションに耐えうる基礎技術が社内に蓄積されるとともに、MVP(Minimum Viable Product)を用いたニーズ検証により、一部の業種において顧客ニーズを理解するに至りました。現在は、これら基礎技術と確認されたニーズに基づきソリューションの開発を行うと同時に、2025年以降の急成長期に備え社内体制の整備を進めています。それに加え、第二弾、第三弾のソリューションに繋がるような研究開発も継続的に行っており、波状的にサービスをローンチしていく予定です。
なぜやるのか
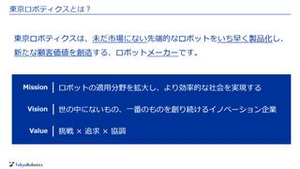
東京ロボティクスとは?
当社の目的は、ロボットの適用分野を拡大し、より効率的な社会を実現することです。
現在、協働ロボットが現場で徐々に使われるようになってきましたが、今後は、力制御協働ロボット、移動マニピュレータ、多指ハンド、そして人型ロボットの実用化に向かうことが必然の流れと言えます。それに伴い、アプリケーションも、工場、倉庫、店舗から、オフィス、家庭と、徐々に人間に近付いて行きます。我々はこの流れを加速し、人類を単純労働や危険作業から開放するとともに、人間のパートナーになり得るような人間共存ロボットを創出します。
どうやっているのか

繁忙期のオフィス

ロボット現場調整中
メンバーは、フルタイムが20人、企業の週末エンジニア・学生インターンが25人という構成です。皆、ロボットやAIが好きということで共通しています。
主要メンバーは、機械、電子回路、組み込みソフトウェア、認識・学習を含む上位アプリケーションの担当に分かれ、各自専門性を高めつつ、協力し合っています。それもあり、企画から1年足らずで産業用ロボットアームに準じる性能のロボットアームを完成させ、その後ヤマハ発動機との業務資本提携に至りました。
「良いロボットを作る」という一点に集中し、日々黙々と仕事をしています。口よりも手を動かすことが大事なので、職場は意外と静かです。
こんなことやります
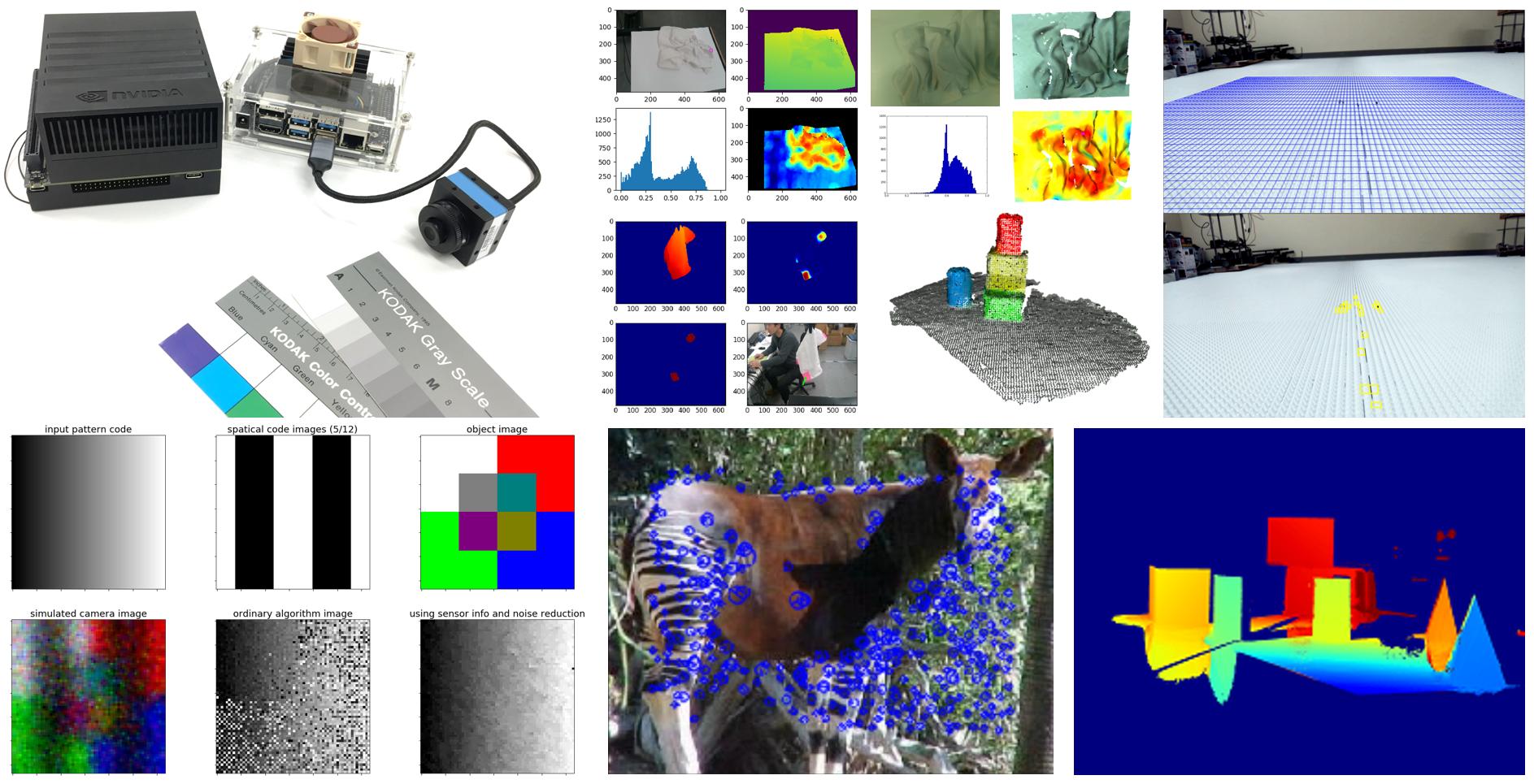
自律ロボットには、対象物の位置検出、三次元形状認識といった画像認識処理が不可欠です。
ただし、自律ロボットは基本的にバッテリ駆動であるため、消費電力の小さいエッジデバイス上で処理を実行できる必要があります。
そこで、映像信号処理、点群処理、画像認識の実務経験者で、かつ以下のようなスキルを持っている/身につけたいエンジニアを募集しています。
<画像処理関連>
・ノイズ除去・平滑化・エッジ抽出のための画像処理の理解と実践経験
・各種画像解析手法の理解
・一般物体認識に必要なSIFT特徴量等の理解
・カメラキャリブレーションの理解
・ステレオ画像から三角測量法を用いて3次元情報を復元する3次元ステレオ計測法の理解
・レンズ・イメージセンサを用いた光学設計の理解
<実装関連>
・オブジェクト指向やデザインパターンに基づいたソフトウェア設計の理解と実装経験
・C/C++11の実装経験
・OpenCVを用いた画像処理プログラムの実装経験
・マルチスレッドプログラミングの実装経験
・PointCloudLibraryを用いた三次元点群処理の実装経験
画像認識処理をエッジデバイス上に実装し、自律ロボットに活用してみたい方は是非ご応募ください。
0人がこの募集を応援しています
会社の注目のストーリー
東京ロボティクス株式会社の他の募集
- ロボットエンジニア
最先端のロボット開発に携わるロボットエンジニア
- サーバーサイドエンジニア
知能ロボット群を管理する基盤ITシステムの開発者募集!
話を聞きに行くステップ
- 応募する「話を聞きに行きたい」から応募
- 会社からの返信を待つ
- 話す日程を決める
- 話を聞きに行く
会社情報