/assets/images/1724115/original/714b3973-7247-4eca-8eb1-3bc4df3ba003?1500521997)
株式会社アプトポッドでは一緒に働く仲間を募集しています
アバターロボットを遠隔でリアルタイム制御する未来へ 〜Aptpod×MELTIN MMI エンジニアクロストークインタビュー〜

on 2019/02/21
株式会社アプトポッド(以下aptpod)と株式会社メルティンMMI(以下、MELTIN)は昨年5月、アバターロボットを活用するための様々な研究に取り組む共同開発に乗り出すことを発表しました。この記事では、そのやりがいや難しさについて、両社のエンジニアの方々にお聞きします。
〜高度な遠隔制御で人間の体を拡張する未来が実現する
-まずは各社の事業概要と、今回の共同開発におけるそれぞれの役割をお聞かせください。

白金:aptpodでは、双方向データストリーミングを実現するIoTフレームワークや、ファストデータを可視化するWebアプリケーションプラットフォームなどを提供しています。それらの全てについて、エッジ、サーバーからUIまでを開発・製造し、一気通貫でお客様に届けているというのが弊社の特徴です。
關:MELTINの事業の軸は、21世紀のサイボーグ技術です。人の身体の情報を読み取り、自分の代わりとなる機械を思い通りに動かせるインターフェイス、つまり自分の体の代わりに動く機械としてのサイボーグを作っています。MELTIN MMIという社名にも、MMI(Man Machine Interface)=人と機械をつなぐインターフェースにmelt inする(溶け合う)という意味があって。弊社CEOの粕谷とCTOである自分の夢を実現する会社です。
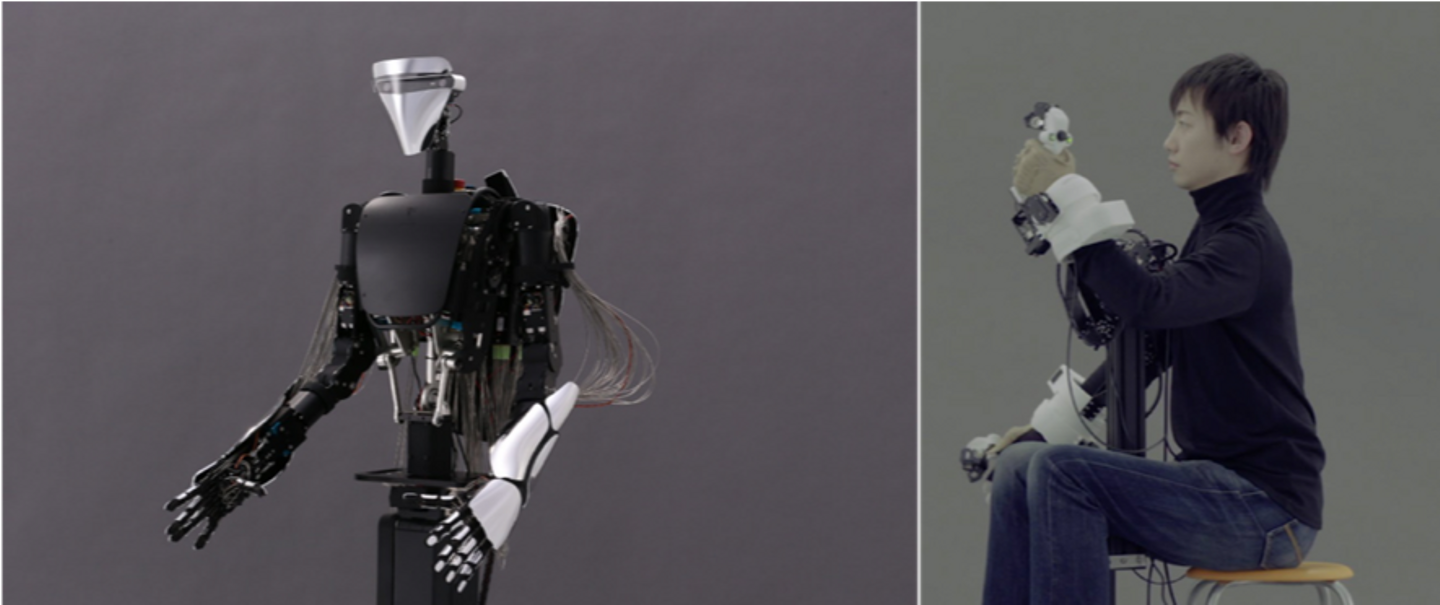
關:持っている技術としては、体の中を流れる生体信号*を高精度かつリアルタイムに解析する技術と、人の構造を模倣したロボット技術の二つがあり、それぞれを応用展開しています。*神経を通して人間の四肢を動かし、五感を脳に伝えている電気信号。
photo「MELTANT-α」
〜アバターロボットと遠隔制御技術、「出会うしかなかった」きっかけ
今回の共同開発は、アバターロボットの操作側と制御側間における各種信号や映像データの通信に、aptpodさんのデータストリーミング技術を活用することによって、高度な遠隔制御の実現を目指すというものです。やろうとしているのは「身体拡張」、わかりやすく言うと人間の腕の三本目を作ることですね。
白金:もともとの出会いは、共通のお取引先が「両社の事業は相性がいいんじゃないか」ということで引き合わせてくださったのがきっかけでした。一昨年の5月に技術協業のリリースを出して、アバターロボット「MELTANT-α」の共同開発を発表したのが昨年の5月。その間にも「AWS Summit Tokyo 2017」や「Interop Tokyo」、「SingularityU Japan Summit」などの展示会で、共同開発した製品を展示したりしていました。

-すでに手応えはあって、それをさらに加速させているということですね。両社が組むことの意義を改めてお聞かせいただけますでしょうか。
關:もともとうちがやっていたのは、オフラインでローカルに動くロボット技術、つまりその場で計測してその場で動かすというロボット技術でした。そこから遠隔制御できるサイボーグを作りたいという話になった時に、aptpodさんの技術と組めば飛躍できると考えました。遠隔制御できるアバターロボットを使って自分たちが実現しようとしていることを考えると、生体信号の制御データを低遅延で送り届けるというテーマは絶対について回ります。例えば危険環境で働く人型ロボットを遠隔制御で動かす際、1秒のタイムラグがあっては使い物になりません。

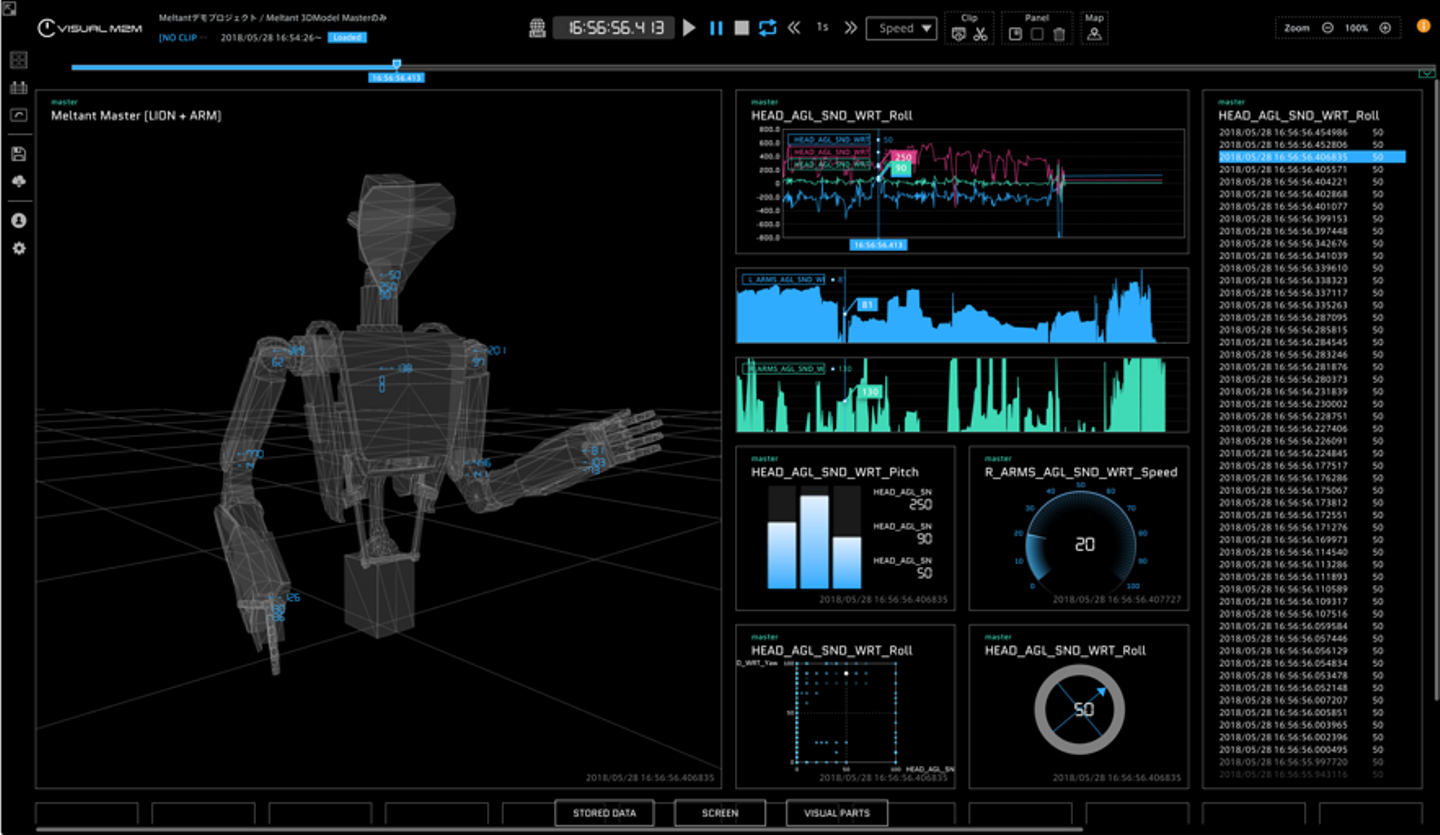
白金:最初に取り組んだのは、生体信号をクラウドに蓄積しながら遠隔で飛ばして制御するというものでした。もともとMELTINさんがされていた生体信号技術を、オンラインに拡張しようという感じです。今回のプロジェクトでaptpodが担当する工程の中では、大きく分けて「データ転送」と「可視化のところ」があるので、そこを南波と私が役割分担しています。
photo「Visual M2M
MELTANT-α制御画面」
〜常に作り手でいたいー原動力は「アバターを動かす」という共通の夢
-このプロジェクトのテーマである「テクノロジーと身体」という領域については、皆さんもともと知見があったのでしょうか。
南波:私は大学時代にブレイン・マシン・インターフェイス(脳と機械をつなぐインターフェイス)の研究を3年間していました。まさに生体信号を解析して有用に使うという領域で、それを実用化して役立てたいということにはその頃から興味がありましたね。

關:私の場合は闇が深いんですが(笑)もともと恐竜マニアで。私が3〜4歳の頃、ロボットに肉付けして動く恐竜を再現する「ロボット恐竜」がブームになっていて、当時はロボット恐竜だけの博物館もあったんですよ。それにすごく興味を持って、その興味がゴジラに転移して、さらに敵キャラのメカゴジラに興味が湧いて・・・そういうロボットへの興味が、Honda ASIMOの登場で加速したという感じです。「自分はこれをやる」と決めて今に至るので、大学を決めるときも研究室を決めるときも迷いはありませんでした。
南波:ジュラシックパークとか、そういうのが流行した時期でもありますよね。
-南波さんは、大学でブレイン・マシン・インターフェイスの研究を始めたそもそものきっかけって何だったんですか?
南波:初めてそういう領域に触れたのは「クラインの壺」という日本の小説です。仮想世界と現実世界の境界が曖昧になって、仮想現実の世界から戻ってこられなくなる・・・みたいな話なんですが。同じく仮想世界を扱った「ソードアート・オンライン」というライトノベルにも学生時代にはまったりして、面白いな〜と思っていました。大学に入って、そういう領域の研究室に運よく入ることができたという感じです。
-皆さんの共通点として、興味があるところから「作る側」に行ってしまうというのがすごいことだなと思います。
白金:迷いはなかったですね。できるチャンスが目の前にあったのでやってみて、解いて行くと「こう動くのか」と知って・・・と、芋づる式にハマっていきました。大学の頃は元々電子機械の道に進むつもりだったのですが、途中からC言語に興味が湧きまして、その後は学生時代はロボット走行の研究、就職後は歩数計アルゴリズム開発など制御・人の体の動きなどの開発に携わることができました。この知見を活かしつつ今後も幅広くチャレンジしたくてaptpodに入社したという経緯があります。

關:私は先ほど話したように幼い頃から「これをやる」と決めて迷いがなかったので、在学中にMELTINを立ち上げました。在籍していた大学内のベンチャー支援制度に応募して、そのまま起業です。
-さらっとおっしゃいますが、研究していることを事業化するというのも、越えるのが難しい大きな一歩だと思います。
關:研究課程って、ともすれば単位を取ることが目的になってしまっているというか、一度でもいいからチャンピオンレポートを出せればいい、計測の瞬間だけ動いていればいいというようなところがあるんです。そこに疑問を感じて、研究していることを実用に結びつけるための会社を立ち上げました。起業後は失敗することもあれば新しいアイデアを生むこともありましたし、事業としては二転三転することもありましたが、当初やりたいことからはぶれていません。
失敗というのは、技術的なことよりもシナリオの部分ですね。開発した技術をどういう時に使ってもらえるかとか、どういう形であれば使ってもらえるのかとか。例えば昨年の2月までは全身ロボットではなくハンド系ロボットを作っていたんですが、ハンドだけのロボットだと結局「使い道がね・・・」と言われる機会が増えてしまって。じゃあ全身作っちゃおうよ、というような軌道修正がありました。
〜ある日突然、全身ロボットを遠隔操作したいって・・・
白金:今回の共同開発の話が持ち上がったのも、MELTINさんで全身ロボットの製作が進行しているタイミングでしたよね。
關:そうですね。当時すでにロボットハンドの遠隔制御では協業を始めていて、全身ロボットの製作は裏で進めていたんですが、大体の目処がついてきた頃に「これも遠隔で動かしたいんで、オンラインで制御信号を飛ばすのお願いできませんか?」とお願いしました。
-今回の共同開発に乗り出した具体的な裏話、ぜひお聞きしたいです。
關:その時はaptpodの坂元社長にわざわざ渋谷のオフィスまで来てただいて、組み立て途中の全身ロボットをお見せしました。一昨年の11月だったかな。ロボットを見た時に「うおー」というリアクションをいただいて。
白金:その後我々が全身ロボットを見たときも同じ「うおー」というリアクションになりました(笑)。そこからは「こういうことができるよね」とアイデアを出し合いながら自由に開発を進めています。最初は、アームと(ロボットの目が)見ている映像を送るところから始めましたよね。

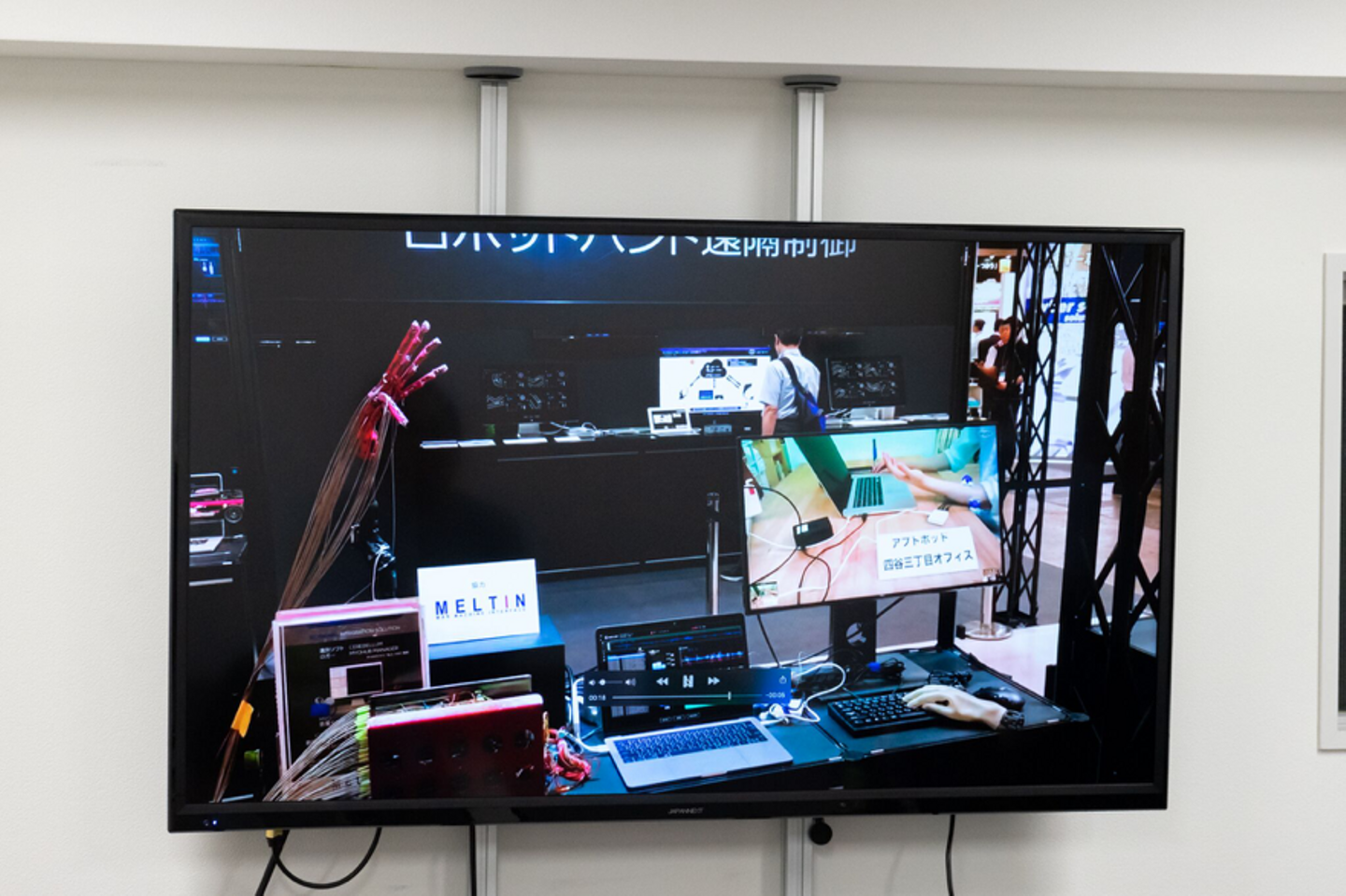
關:最初は身体に直接つけたセンサーから生体信号を飛ばそうということをやって、その次に、カメラにかざした手の動きに合わせてロボットハンドが動くというモーションキャプチャをやりました。このロボットハンド(写真)が、生体信号を飛ばしている最初のデモンストレーションでしたね。
白金:この時、生体信号を送る側のオフィスと会場をFacetimeで繋いでいるんですが、映像よりも生体信号の方が低遅延で(速く)送られてくるんで、逆にロボット側が人間に信号を送ってリモートで動かしてるみたいになっちゃったんですよね(笑)
photo 「イベント会場:ロボットハンドが生体信号を飛ばしているデモ」
-こういったデモを見たときの観客の反応はどういうものなんでしょうか。
白金:「え?これは遠隔の今の動画ですか?」、「どうやって遠隔で制御できているの?」のお声が多かったです。
南波:ちょっと展示に必死で、覚えていない部分もあります・・・(笑)
〜やりがいは作っているモノと周囲、両方の「リアクション」
-こういった開発をされていて、やりがいを感じる瞬間というのはどういう時でしょうか。展示会のように、周囲のリアクションをじかに感じられる機会ですか?

南波:僕は、ロボットにしろシステムにしろ、動いた瞬間ですね。やったことが期待通りの動きをしている、という状況が一番嬉しいです。
白金:私は可視化のところを担当しているので、細部まできちんと表示されるというのがやりがいを感じる瞬間であり、やらなくてはいけないことだと思っています。
關:私の場合はいくつかフェーズがあって、まずローカルで動いた時。2つ目は、aptpodさんのシステムによって遠隔で動いた時。そして3つ目が、表に出した時の皆さんのリアクションです。最終的にはそれを使わせてくれという声を色々な企業様から言っていただいて、さらにアップデートが続いて・・・と、いろんなフェーズで嬉しい瞬間があります。
どういった企業様からお声かけをいただいているかはまだオープンにできないんですが、今後にご期待いただければと思います。「ポッと出のベンチャーが作ったもの」という以上の反応をいただいていて、きちんと「こういうことに使いたい」というお話が多いのは嬉しいです。
最近だと「人魚の眠る家」という映画に技術協力をしました。ロボットが出てくるシーンがあるんですが、CGではなく実際にモノを使ってやりたいという監督のご意向で。その時は分かりやすく親戚や友人から「見たよ!」って連絡をもらいましたね。
白金:日頃バックグラウンドのシステムを提供している我々にとっては、こういう形でMELTINさんと組むことによって夢を見させてもらっているようなところもあります。夢だけじゃなくて、現実にしていかなきゃいけないんですけどね。
〜漠然とではなく「やりたいんだ」という強い気持ちとこだわりを持って欲しい
-現実にしていくために、チームメンバーとして求める人材像についてお聞きしたいと思います。
白金:今回の我々の共同開発もそうですが、開発の先に「こういう風に使ってもらいたい」という意見を持っている方だと、同じ土俵で意見を交わせるんじゃないかなと考えています。こういうものを作ってみたい、あるいはこういう風に改善した方がいいのではないかというイメージがあると、どんどん先に進んでいけますよね。漠然とIoTをやりたいではなく、デバイスから発信するデータを使用して何を実現・提供したいかかというところを持ってきてくれると、活躍できるんじゃないかなと思います。
關:私自身は経営者の視点も入るのですが、ただ仕事をしてサラリーをもらうという割り切り方はしてほしくないなと思っています。我々がやっていることというのはすごく泥臭い、根気の要る作業です。本来動くはずのものがなぜか動かなかったり、どの手順を遡っても間違いがないのになぜか動かなかったり・・・そういう苦労と時間と労力のかかる作業が山のようにあります。サラリーだけでいくときっとモチベーションは続かないので、自分がやりたいんだという気持ちを強く持っていてほしいですね。
-開発者のプライドのようなものでしょうか。
白金:何とかしてこの問題をクリアしてやる、ねじ伏せてやるみたいな気持ちは強いです。
關:エンジニアってみんなそうだと思うんですが、自分が自信を持って作った作品が動かないという状況がひどくプライドにくるんですよね(笑)。もっというと私の場合は事業そのものにもプライドがあるというか、他の会社が作っているものを「ローコストでできます」「小型でできます」というところに新しさを見出すのではなく、「普通じゃできないことを実現しています」というレベルで、技術的に抜きん出ているという自負がないと心が折れちゃうんです。その形として、自分の作ってきたものがうまく動かないと嫌だ・・・という世界です。
南波:僕はどちらかというと「動けばいい」側で。すごい技術があるなら勉強して特徴を掴んでうまく使いつつ、うまくいかないんだったら公になっている他の技術を使って・・・とにかくまずは動かしてみて、それを見た人が「あんなこともできそうだね」って思ってくれたらいいなという価値観です。
關:その考え方もずれてはいないと思います。目的を達成するために技術があるという点では一緒なんですよね。aptpodさんの「Visual M2M」も同じで、我々エンジニアだけのコミュニケーションであればコードを見れば分かるので、あんなダッシュボードは必要ありません。ただ、どんなにすごいシステムでも専門知識がないと理解できないようなものではお客様に使ってもらえない。それでは意味がないんです。
最後に、エンジニア自身は知識への貪欲さが絶対に必要だと思います。今ある知識がどんなに凄くても、それだけで勝負しようとすると必ず頭打ちになる。エンジニアの場合、自分のスキルのアップデートを欠かすと、自分の価値が時代遅れになってしまうんです。
白金:「こういう組み合わせだとすぐにこうできるんではないか」という模索も日々必要だと思います。
關:そう。ずーっと悩んでいたことが、調べてみたら10秒で解決するんかい、みたいなことはありますよね。場合によっては人の頭を借りるという柔軟性が必要。探究心と柔軟性と知識欲と、そして泥臭さ。これがエンジニアに必要な要素だと思います。
-ありがとうございました。
アバターロボットを遠隔でリアルタイム制御する未来へ 〜Aptpod×MELTIN MMI エンジニアクロストークインタビュー〜

/assets/images/1724115/original/714b3973-7247-4eca-8eb1-3bc4df3ba003?1500521997)
/assets/images/1753979/original/714b3973-7247-4eca-8eb1-3bc4df3ba003?1502268917)
