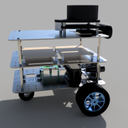




つくばチャレンジ-画像処理のみ自律制御
せっかく画像処理の研究を始めたので、一般的な自律移動する方法である、地図作成/自己位置推定/行動計画の手順を踏まない方法で自律制御をしました。 動画のように、領域抽出手法を用いて、走行可能な道路領域(紫)内を進行し続け、人間(赤)や自動車(青)を避けるように設定。方向転換を行う交差点などで特徴的な物体を検出しそれを合図に目的の方向に向きを変え進行を続ける制御を実装し自律走行システムを実現しました。さまざまな画像処理手法を組み合わせることにより、Lidarなどの距離センサを一切使うことなく自律制御をし、チューニングされた環境であれば、安価なWebカメラのみで自律走行する手法を提案し、計測自動制御学会2018で優秀賞を受賞しました。